


















One of my favourite sayings about metal detection technology is“Anyone can make a detector that detects metal, but not everyone can make a detector that ignores ground mineralisation”. This is the ongoing challenge for improving upon detection depth and sensitivity in the various types of grounds that exist in gold bearing areas around the world. Over the past 20 years, Minelab has been continually enhancing our PI MPS technology; starting with the original SD 2000 in 1994 through to the GPX 5000 in 2010, with multiple timings and different ground balance options. Each product version, as a combination of hardware and software, has improved upon the previous model, with the objective of minimising noise and extracting the faint gold signals from difficult ground.
Gold detectors have evolved from basic VLF, or continuous wave, to deeper penetrating PI units, to the latest ZVT technology from Minelab. A great benefit of the GPZ 7000 platform is that online software upgrades are now possible and we’re able to provide you with updates as we further improve upon ZVT. So what’s this GPZ upgrade all about – you may well be asking?
It’s all about improving the ground tracking ability of the technology. While more basic detectors apply broad coarse level filters to eliminate areas of noise (which can result in a less sensitive detector) our R&D team has greatly refined the ZVT signal processing, since the release of the GPZ 7000, to more closely track to varying and difficult ground conditions. The first step towards this improvement was determining that the yellow ferrite ground balancing method provided an advantage and the second step is the software upgrade, with the new auto tracking algorithm that is now available.
The best way to describe the improvements is to consider some common detecting events or scenarios and how these impact on the detector ground tracking and the resultant audio responses. Note – when looking at this, please be aware that this is a very generalised simplification of the detector signal processing, but does give very representative ‘before’ and ‘after’ outcomes. Also note that the red traces on the diagram show an extremely zoomed in view of what’s occurring inside the detector.
Original software – February 2015 (Control Panel: 1.0.8-57)
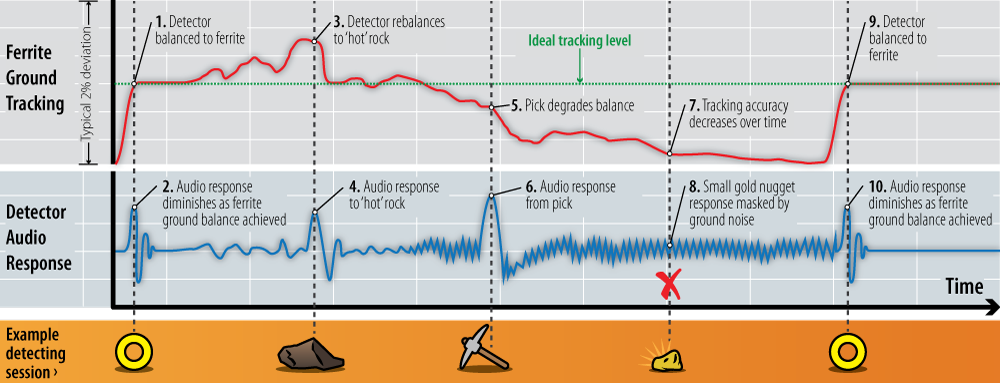
Firstly, let’s go over how the original GPZ software behaved over ground and objects. A typical detecting session starts with (1) the yellow ferrite ground balancing to the ideal tracking level (green line on the upper graph) and (2) the audio response settling. Over time, and as the ground varies, the tracking may drift slightly from the ideal level, even though the auto function tries to maintain the ideal level. If (3) a relative large hot rock is encountered then this could be detected, rather than ignored and this would result in (4) an audio response. As you continue detecting, the tracking could continue to drift slightly as shown by the red line position deviating down from the green dotted line. While this may look to be very inaccurate, the zoomed scale of this is within +/- 1% of the ideal level. The next possible event is detecting your pick or digging tool or other large metal object This will (5) alter the ground balance further and there will be (6) a large audio response. As well as (7) throwing the balance out, the result from this may be (8) more jittery noise occurring, which could cause smaller gold nuggets to be missed. Therefore it becomes necessary to (9) carry out the ferrite balancing again which (10) starts the whole cycle again.
Ground Tracking Update – October 2015 (Control Panel: 1.2.8-98)
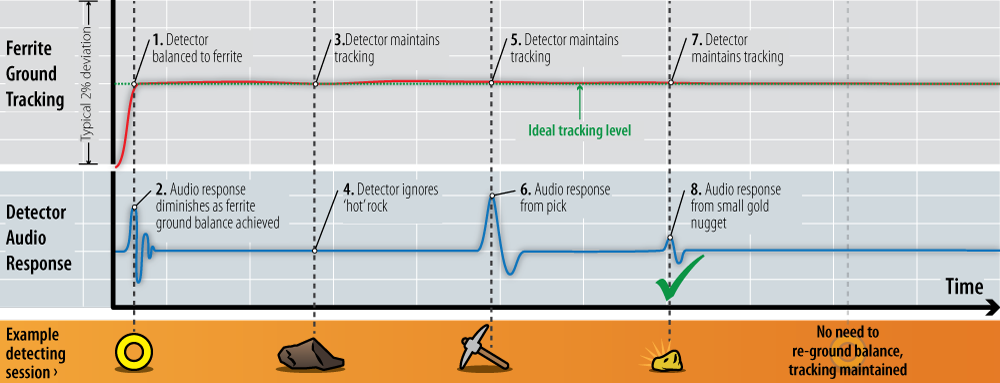
With the new update, we have improved the ground tracking so that the detector is much less susceptible to the typical events that will cause the tracking to deviate from the ideal level. When considering the above graph, the red tracking line locks to the green dotted line after the initial ferrite ground balance procedure is performed. Compared to the original software, subsequent events have a greatly reduced effect on the balance of the detector. Hot rocks will still be detected but to a lesser extent and detecting your pick will still cause an audio response but it won’t impact the tracking. For the same size gold nugget that was masked by noise on the first graph, it will now be detected with the new software update; and there will no longer be a need to continually re-ground balance with the ferrite, unless perhaps moving to a completely new area.
Overall, the detector will now remember the ground balance level for the duration of a detecting session while concurrently tracking to any local ground noise variations in a responsive manner.
It’s now been a couple of weeks since the update was released and there are already some good reports coming in from around Australia, where many users have carried out the upgrade and seen noticeable performance improvements. For everyone who has not carried out the upgrade yet – I recommend you do so, along with using the yellow ferrite as part of the ground balance procedure. This will ensure you maximise your GPZ’s ability to extract gold signals from the ground noise.
Comments
To make comments you must be logged in, please note comments will not display immediately due to moderation
* suddenly the machine audio shutting down " no out put audio " . in spite we change all the access ares .battery - out speaker - head phone -speaker model
please send me
Middle East & Africa
Minelab MEA General Trading LLC
Sales, Support & Service
Unit S-1, Humaid Sultan Building,
Frij Al Murar, Deira, PO Box 6934, Dubai, UAE
T: +971-4-2549995
F: +971-4-2549933
E: minelab@minelab.ae
Thanks